









ContextCapture
Pomocí softwaru ContextCapture je možné na základě jednoduchých fotografií rychle vytvořit i ty nejsložitější 3D modely stávajících podmínek pro všechny druhy infrastrukturních projektů.
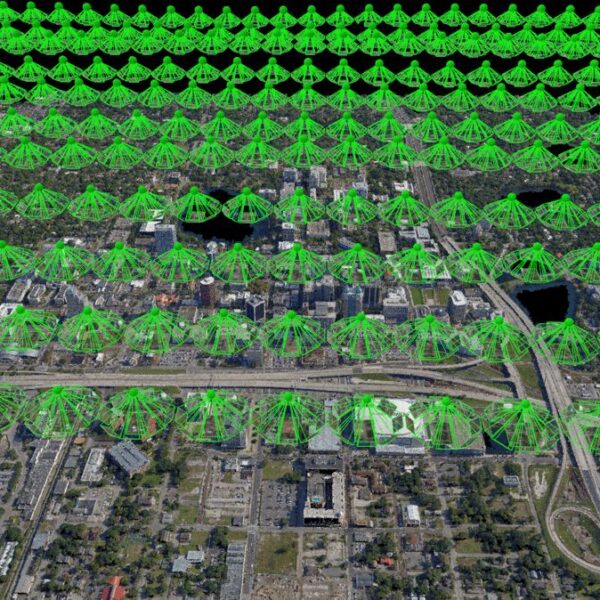
Pomocí softwaru ContextCapture lze na základě jednoduchých fotografií rychle vytvořit i ty nejsložitější 3D modely stávajících podmínek pro všechny druhy infrastrukturních projektů. Tyto podrobné 3D modely reality lze rychle vytvořit bez nutnosti použití drahého specializovaného vybavení a použít je k zajištění přesného reálného kontextu pro návrh, výstavbu a provozní rozhodnutí během životního cyklu projektů. Hybridní zpracování ContextCapture umožňuje vytvářet sítě reality připravené k práci, které zahrnují – všestrannost a pohodlí fotografie s vysokým rozlišením, v případě potřeby doplněné o další přesnost mračen bodů z laserového skenování. To umožňuje nákladově efektivní vytváření přesných sítí reality s menšími časovými a zdrojovými nároky na specializované pořizovací vybavení a související školení. 3D modely lze snadno vytvářet až z 300 gigapixelových snímků pořízených běžným fotoaparátem a/nebo z 500 milionů bodů z laserových skenerů, což vede k jemným detailům, ostrým hranám a geometrické přesnosti.
To zajistí, že je možné úspěšně vytvořit jakýkoli vysoce detailní model v kratším čase bez rizika softwarových omezení. Výrobu modelů prakticky libovolné velikosti a s libovolným stupněm přesnosti lze automatizovat mnohem rychleji, než bylo dříve možné. Získejte přístup k těmto bohatým modelům reality zobrazujícím reálné podmínky a zpřístupněte je pro použití v jakémkoli inženýrském nebo GIS pracovním postupu. Využitelné a dostupné informace lze snadno sdílet na kancelářském počítači a mobilních zařízeních, a to v mnoha formátech, včetně nativních v rámci aplikace MicroStation.
Bezplatný program pro hodnocení projektů ContextCapture: https://store.bentley.com/en/products/iware/1000CCV–ContextCapture-Viewer